
Yarım yüzyıldan fazla bir süredir Ay’a ayak basan ilk insan kaşiflere yardımcı olabilecek robot tasarımları üzerinde çalışmalar devam ediyor. Gelecek yolculuğun en önemli yönlerinden biri, yerinde kaynak kullanımı (ISRU) olarak bilinen, ay yüzeyinde mevcut olan kaynakların kullanılması olacak. Bu, kaşiflerin su, yapısal metaller ve itici gaz gibi malzemelere erişmesini sağlayacak, ancak bu malzemeleri yalnızca ayın yüzeyini oluşturan kaya ve regolitten kurtarabilmeleri durumunda.
Tohoku Üniversitesi’ne bağlı araştırmacılar tarafından hazırlanan yeni bir makale, bir gün Ay kaşiflerine dünyanın potansiyelini ortaya çıkarmada yardımcı olabilecek bir tür robot ekskavatörün tasarımını ve test edilmesini anlatıyor. Çalışma şu adreste yayınlandı: arXiv ön baskı sunucusu.
Ay’da geleneksel madencilik ekipmanlarının kullanılmasıyla ilgili temel sorunlardan biri yerçekimidir. Buldozerler ve kepçeli ekskavatörler gibi ekipmanlar, ağır ağırlıklarını, kazdıkları malzemeye kuvvet uygulamak için kullanarak, büyük parçaları bir seferde hareket ettirmelerine olanak tanıyarak kendi avantajlarına kullanırlar. Bu teknik, düşük yerçekiminin “ağır” madencilik ekipmanlarının bile herhangi bir kaynağı çıkarmak yerine kendisini itmesine neden olacağı Ay’da mümkün değildir.
Bu nedenle hem Tohoku Üniversitesi’ndeki hem de NASA’daki mühendisler dikkatlerini “kepçeli ekskavatör” tasarımına çevirdiler. Bu kullanım durumunda, kovalı tambur tasarımının aydaki geleneksel madencilik ekipmanlarına göre iki önemli avantajı vardır. Birincisi, her geçişte yalnızca küçük miktarda malzeme çıkarabiliyor; bu da tek bir büyük kepçe veya kovaya göre çok daha az kuvvet gerektiriyor.
Bununla birlikte, geçişler hızlı ve sürekli olarak gerçekleşebilir ve bu da nispeten kısa bir sürede büyük miktarda kazı yapılmasına olanak tanır. İkincisi, malzeme manipülasyonu için kazı, malzeme yükleme ve taşıma olmak üzere üç temel işlemi, tümü de aşındırıcı ay tozu ortamında arızalanmaya yatkın olan bir taşıma bandına ihtiyaç duymadan gerçekleştirebilir.
NASA’nın Regolith Gelişmiş Yüzey Sistemleri Operasyon Robotu (RASSOR), kendisi de birkaç tur testten geçmiş olduğundan şu anda bu tür ekskavatörler için altın standarttır. Bununla birlikte, Japonya’nın uzay ajansı JAXA, 2050 yılına kadar Ay kaşiflerini desteklemek için Dünya’dan sürekli denetim gerektirmeyecek robotlar sağlamak amacıyla bir “Moonshot Programı”nın geliştirilmesini desteklemektedir. Son makale, programın orijinal olarak Üniversitede geliştirilen modüler bir platform olan Moonbot’unun bir eklentisini açıklamaktadır.
Mühendisler, geleneksel kovalı tambur tasarımlarının ana sorunlarından birini, yani tambur dönerken malzemenin düşmesini çözen bir tür “spiral kova” tasarladılar. Bu iyileştirme, tambur girişinin her zaman toprakla temas halinde olmasını sağlarken çıkışın her zaman toplanan malzeme seviyesinin en azından biraz üzerinde olmasını sağlayarak malzemenin dökülmesini durdurur.
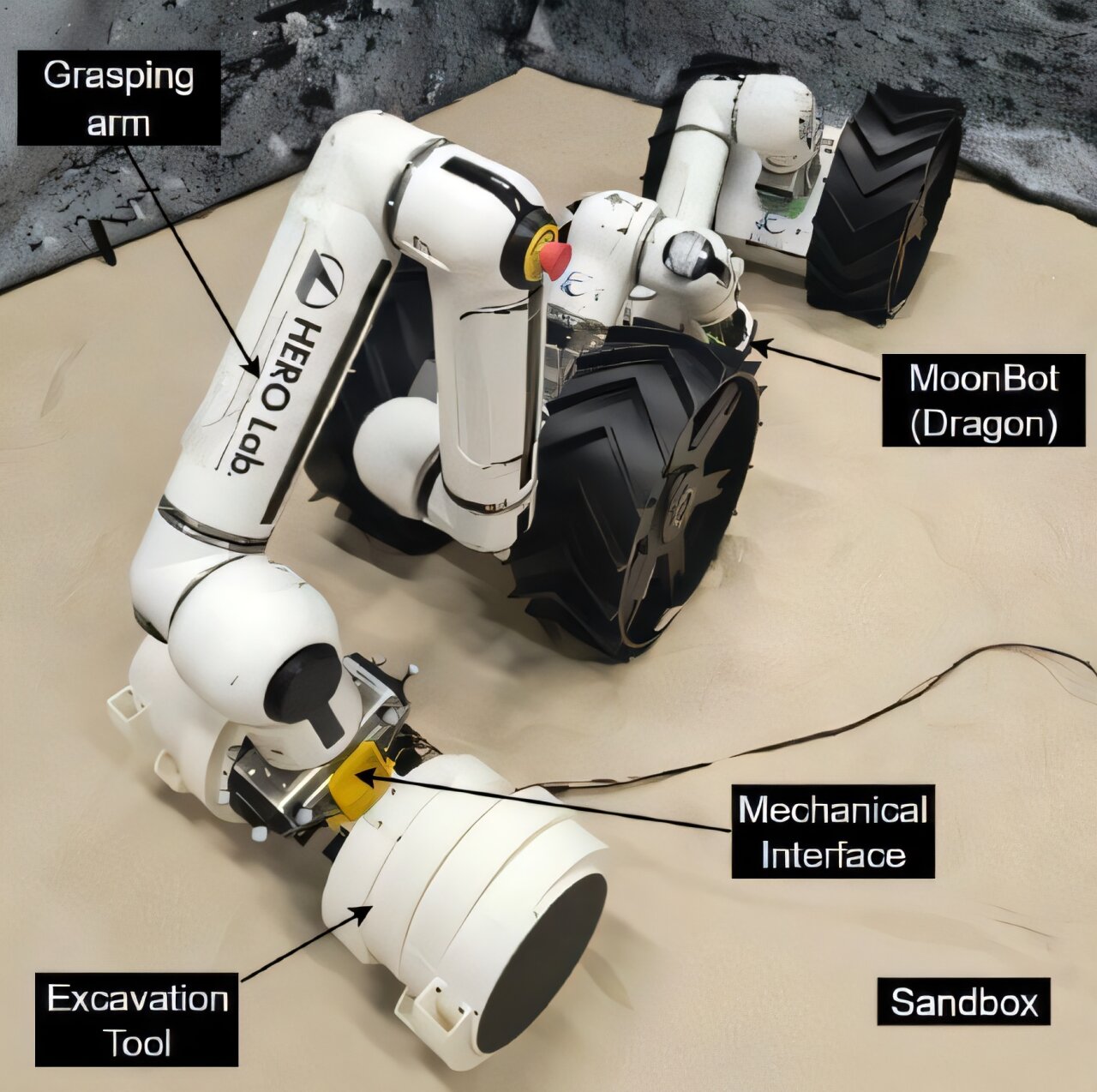
Etkinliğini kanıtlamak için yazarlar bir prototip sistem oluşturdular ve onu Moonbot şasisine bağlayarak veya takmadan bazı testler yaptılar. Robotik bir kolun her iki yanında bulunan (Moonbot platformuna arayüz sağlayan) iki tambur büyük ölçüde 3D baskılı PLA’dan yapılmıştır ve bazı dişlilerde bazı karbon fiber takviyeleri vardır. Ataşmanın kendisi yalnızca 4,8 kg ağırlığındadır ve tam yüklü olduğunda yaklaşık 21 L malzeme taşıyabilmektedir.
Bağımsız kol için test sonuçları etkileyiciydi. Tek başına yaklaşık 777 kg/saat kazı yapabilir, yalnızca 0,022 Wh/kg tüketir ve büyük kazı miktarları için etkileyici derecede düşük güç tüketimi sağlar. Bir “Dragon” gezicisine (yani gezici olarak yapılandırılmış bir Moonbot şasisi) bağlandığında bile, kazı hızı gerçekte 839 kg./saat’e yükseldi.
Bununla birlikte, gerçek bir görev senaryosunu simüle etmek için ekip daha sonra, robotun malzemeyi dolana kadar kazacağı, 10 metrelik bir “çöp sahasına” gideceği, topladığı malzemeyi bırakacağı, çalışma sahasına döneceği ve yeniden çalışmaya başlayacağı bir protokol uyguladı. Bu senaryoda verimlilik, 0,86 Wh/kg güç tüketimiyle yalnızca 172 kg/saat’e düşer; bu, özel madencilik rolünden önemli ölçüde daha kötüdür ancak RASSOR gibi diğer sistemlerle karşılaştırılabilir.
Ancak her zaman iyileştirmeye yer vardır ve bu durumda hem görev tasarımında hem de robotun tasarımında yer vardır. Moonbot modüler bir platform olduğundan, görev tasarımcıları, malzemeyi çöp sahasına taşıyabilecek, kazı kolunun en iyi yaptığı şeye, yani malzemeyi kazmaya odaklanmasını sağlayacak ayrı, özel bir gezici/taşıyıcı sağlayabilir.
Tasarımcılar bunu daha da iyi hale getirmek için bir sonraki yinelemede ek sensör ve kontrol özellikleri uygulamak istiyor. Ayrıca onu, gerçek kullanım durumu açısından kritik olabilecek, aydaki zorlu ortama dayanacak şekilde tasarlamayı da planlıyorlar.
Şimdilik makale, ay yüzeyinde yardımcı robotların geliştirilmesine yönelik başka bir adımı temsil ediyor; kovalı tamburlar bu kullanım durumu için mühendislerin favori tercihi gibi görünüyor. Ay’da bunlardan birini hareket halinde görmemiz biraz zaman alabilir, ancak gelecekte bir noktada dönen bir kova, milyarlarca yıldır bozulmadan kalan ay malzemesini çalkalamaya başlayacak.
