
Modülerlik, uzay araştırmalarında birden fazla şekilde yaygınlaşıyor. Yaklaşan “Lunar Gateway” uzay istasyonunun tasarımının modüler olması ve farklı modüllerin farklı kuruluşlar tarafından sağlanması bekleniyor. Almanya’nın uzay ajansındaki (DLR) araştırmacılar, bu düşünceyi yerdeki gezicilere kadar genişletmek amacıyla, tek, modüler bir gezicinin ay veya Mars çevresinde hem keşif yapmaktan hem de yük taşımadan sorumlu olabileceği bir mimari geliştirdi. Çalışma şurada yayınlandı: Acta Astronautica.
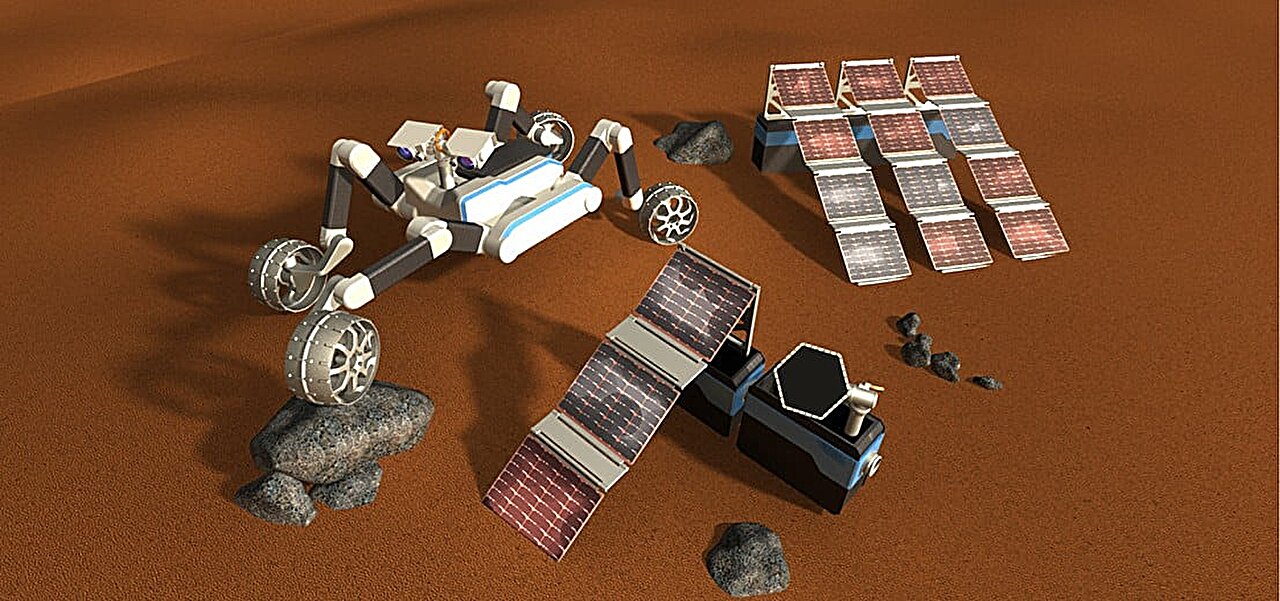
Mimarinin kendisi yeterince basittir; özel “yükleri” taşımak için bir gezici kullanın; bunların tümü, gezici ile faydalı yük arasında elektrik ve sıvıların akmasına izin veren standart bir mekanik bağlantı kullanır. Bu bağlantı aynı zamanda gezicinin yükü ihtiyaç duyulan yere çekmesine ve bölgedeki diğer altyapıya bağlamasına da olanak tanıyor. Yükler ihtiyaca göre değişebilir. Bunlar bir güç kaynağı, bir dizi bilimsel alet, hatta kürek veya kazıcı gibi inşaat ataşmanları olabilir.
Bu tür bir altyapının tipik kullanım örneği, aydan su çıkarılmasıdır. Orijinal olarak DLR’de geliştirilen TransRoPorter (TRP) konseptinden türetilen geziciler, potansiyel su buzunun bulunabileceği yerlerin keşfinden sorumlu olacak. Daha sonra gerekli ekipmanı, buldukları herhangi bir buza yük şeklinde getirebilirler. Daha sonra su buzunu madencilik alanından, astronot habitatlarındaki roket yakıtı fabrikaları gibi daha iyi kullanılabileceği yerlere taşımak için de kullanılabilirler.
Standartlaştırılmış konektörler, iletişim ve kontrol arayüzleri ile bunların hepsi çok daha kolaydır. Bununla birlikte, belki de bu mimarinin en önemli parçası gezicilerin kendileridir, bu nedenle araştırmacı, gezicilerin nasıl hareket edebileceğine ve yüklerle nasıl etkileşime girebileceğine dair birkaç farklı konfigürasyonu simüle etmeye karar verdi.
Gezicilerin tümü, gezicinin tekerleklerinin uzun mafsallı bacakların ucuna yerleştirildiği “hibrit” bir hareket sistemiydi. Bu konfigürasyonun, Curiosity’de kullanılanlar gibi alternatif hibrit sistemlere göre bazı avantajları vardır; belki de bu mimarinin bağlamı açısından en önemlisi, TRP konfigürasyonunun daha hızlı olmasıdır.
Simülasyonda oynanabilecek pek çok başka değişken vardı. En önemlilerinden biri, tekerleklerin bir tarafının tamamının birlikte hareket ettiği şekilde mi (seri) yoksa her iki taraftaki bir tekerleğin diğer bir tekerlekle mi (paralel) kontrol edildiğiydi. Diğer değişkenler arasında, bir yük olup olmadığına bakılmaksızın bacakların konfigürasyonu ve gezicinin hareket etmesi gereken eğim ve yüzey türü yer alıyordu.
1.500’ün üzerinde simülasyonda bazı kritik tasarım seçenekleri öne çıkmaya başladı. Seçimler değiş tokuşları temsil ettiğinden net bir “kazanan” yoktu. Kalça torku ve yerden yükseklik gibi ölçümler gezicinin konfigürasyonundan en çok etkilenen ölçümlerdi ve bazıları bu değerlerden herhangi birinde kabul edilemez sonuçlara neden oldu. Tasarım tercihleri ne olursa olsun sistemin kararlılığı nispeten tutarlı görünüyordu ve gezicinin kendisi nasıl yapılandırılırsa yapılandırılsın, güç tüketimi bir yükün varlığına (veya yokluğuna) göre en fazla değişiyor gibi görünüyordu.
Makale, DLR’nin uzay araştırmalarına yönelik ayaklı gezicilerinin uzun süredir devam eden gelişiminde ileri doğru atılan bir adımı temsil ediyor. Gezginlere keşiften daha fazlası için güvenilmeye başlandıkça ve yeni dünya dışı koloniler için altyapı çalışmalarının önemli bir unsuru haline geldikçe, belirli bir uygulama için en iyi konfigürasyonun anlaşılması kritik hale gelecektir. İhtiyaç duyulan bağlama bağlı olarak farklı konfigürasyonlar arasında geçiş yapma yeteneği daha da fazla olabilir. Bu gezicileri dünya dışına fırlatmak için herhangi bir plan mevcut olmasa da, nihayet çağrıldıklarında hazır olma yolunda resmi olarak bir adım daha attılar.
