
Astrobee, NASA tarafından geliştirilen ve üç farklı küp şeklindeki robottan oluşan serbest uçan bir robotik sistemdir. Bu sistem başlangıçta Uluslararası Uzay İstasyonu’nda (ISS) çalışan astronotlara rutin manuel görevlerini otomatikleştirerek yardımcı olmak için tasarlanmıştır.
Astrobee astronotlar için son derece değerli olsa da, günlük operasyonları tamamladıkları verimliliği artırırken, nesne manipülasyon yetenekleri henüz optimal değildir. Özellikle, geçmiş deneyler, robotun, ISS’de almak için görevlendirilebilecek olanlardan bazılarına benzeyen kargo torbaları da dahil olmak üzere deforme olmuş öğeleri işlerken mücadele ettiğini göstermektedir.
Stanford Üniversitesi, Cambridge Üniversitesi ve NASA Ames’teki araştırmacılar yakın zamanda Pyastrobee, Pyastrobee’yi Pytrobee’yi eğitmek için bir simülasyon ortamı ve kontrol yığını geliştirdi ve özellikle kargo manipülasyonu ve taşınması üzerine vurgu yaptı.
Bu yeni simülasyon ve kontrol araç seti, Arxiv Preprint Server, Astrobee’yi diğer nesnelerle çarpışmadan farklı ISS modülleri arasında başarılı bir şekilde aktarmak için eğitmek için kullanıldı.
Paper’ın ilk yazarı Daniel Morton, “NASA Ames ile işbirliği yaptığımız için şanslıyız ve ilgilendikleri sorunlardan biri, Astrobee’nin (Uluslararası Uzay İstasyonu’ndaki serbest yüzen uzay robotlarının) nasıl lojistik ve bakım görevlerini yerine getirileceğidir.” Dedi.
“Bu, sürekli olarak mürettebatlanamayabilecek ve bu robotlardan istasyonu kargo ile yeniden stoklamak gibi ‘ev işleri’ için özerk operasyonlar gerektirecek gelecekteki herhangi bir uzay istasyonu için özellikle önemlidir. Ancak Astrobee’nin bu kargo çantalarını manipüle etmesi ve hareket ettirmesi gerçekten zor bir sorundur.”
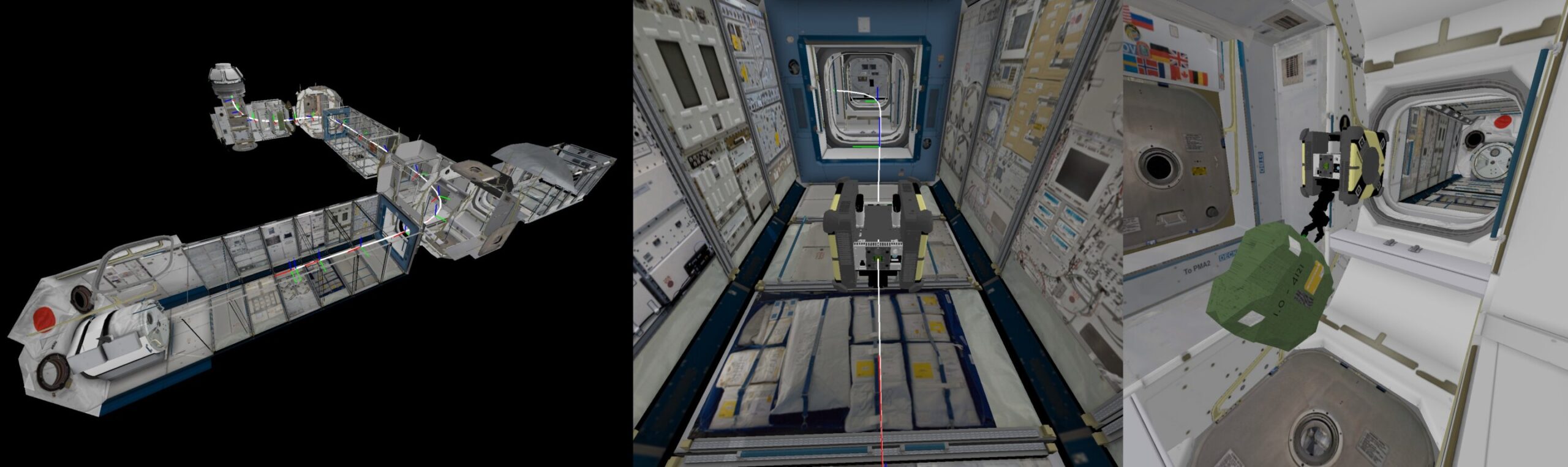
Astrobee’nin kargo torbalarını taşıma ve manipüle etme etkinliğini şimdiye kadar sınırlayan önemli bir zorluk, bu çantaların tipik olarak deforme edilebilir bir vinil bazlı malzemeden yapılmış olmasıdır. Robot onları kavradığında ve onlarla etkileşime girdiğinde kargo torbalarının nasıl deforme olacağını tahmin etmek çok zor olabilir.
Morton, “Bunu kontrol etmenin bir yolunu bulmak için yola çıktık ve sadece ISS’yi doğru bir şekilde temsil edebilecek bir simülasyon ortamı oluşturduk, aynı zamanda deforme olmuş kargo modelliyor.” “Pyastrobee, deforme olabilen kargo modellemesi nedeniyle benzersizdir, çünkü buna izin veren bir fizik motoru (mermi) kullanıyoruz. Python’da da geliştirilmiştir, farklı denetleyicileri hızla prototiplemeyi kolaylaştırır ve diğer robotik yazılım araçlarıyla entegre olur.”
Morton ve meslektaşları simülasyon ortamlarını spor salonu ve istikrarlı taban çizgileri olarak bilinen takviye öğrenme (RL) yazılımı ile entegre ettiler. Umutları, bu yazılımın uzayda RL tabanlı nesne manipülasyon stratejilerini test etmek için platformlarının kullanımını kolaylaştıracağıydı.
Morton, “Döngüde bir simülatör örnekleme tabanlı model öngörücü kontrolörün (MPC) bu sorun için iyi bir ön yaklaşım olduğunu bulduk.” Dedi. “Simülatörü model olarak kullanmak, sistemin zorlu bir kapalı form modelini türetmeye çalışmak yerine Astrobee ve kargo çantasının nasıl birlikte hareket ettiğini belirlemeyi kolaylaştırıyor. Ayrıca, hesaplama doğruluğu ve hız arasındaki ödünleşmeleri keşfederek farklı sadakat modelleri ile de denedik.”
Bu araştırma ekibi tarafından geliştirilen simülatör Pyastrobee, yakında hem mühendisler hem de öğrenciler tarafından uzay robotik algoritmalarını test etmek için kullanılabilir. Simülatörün kodu ve entegre kontrol ve planlama yöntemleri açık kaynaklıdır ve GitHub’a erişilebilir.
Morton, “Artık bir ön yaklaşımımız olduğuna (örnekleme tabanlı MPC) sahip olduğumuza göre, bunu nasıl hesaplama açısından verimli hale getireceğini araştırmak istiyorum.” “Son zamanlarda robot manipülasyonu için yüksek verimli güvenlik filtreleri üzerinde çalışıyorum ve bu, Astrobee’ye koymak, çarpışma önleme gibi kısıtlamalar hakkında garanti vermek için mükemmel olurdu. Ayrıca, bu görevi yerine getirmek için birden fazla Astrobees’in nasıl kullanılacağını keşfetmek istiyorum-torbanın her iki tarafını tutan Astrobees, taşıma sırasında stabiliteyi muhtemelen iyileştirecektir.”
